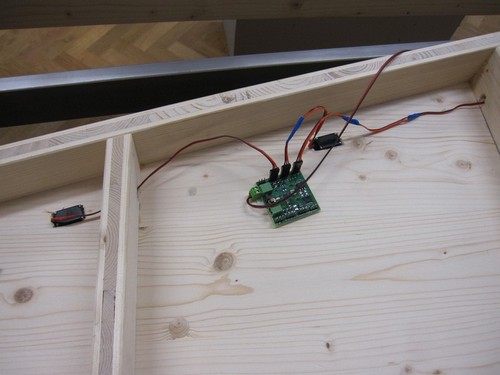
Vor dem „Serieneinbau“ von ca 40 Weichenantrieben im Schattenbahnhof habe ich einen Prototyphergestellt. dabei wurde auch die Funktion der Gleisbesetztmelder mit der Software TrainControllergetestet.
Für den Einbau von Servos zum Weichenantrieb muss entsprechend „Federweg“ vorhanen sein, um die Weichenzungen leicht an die Schienen anzupressen, ohne dass die Servos heisslaufen oder womöglich sogar in eine mechansiche Endstellung laufen können.
Trotz aller Justiermöglichkeiten an den Servos wollte ich möglichst ohne individuelle Anpassungen jedes einzelnen Servos auskommen.
Den Antrieb von unten – wie an den Hauptebenen erforderlich – wollte ich wegen der Zugänglichkeit gerne vermeiden. Ich habe zwar unter den Elemenetn des Schattenbahnhofs ca 40 cm Platz, muss aber am Rücken liegend arbeiten.
Eine für Modellbauer sicher geeignet devote Stellung, aber trotzdem ..
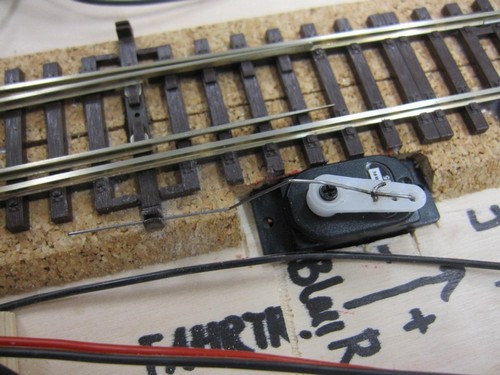
Deshalb Einbau der Servos von oben, sodass nur der Servokopf aus der Platte ragt. Wenn der Servo bei der Weiche aussen am geraden Gleis neben der Weichenzunge eingebaut ist und nicht innen oder an der anderen Seite, bleibt er mit dem Servoarm auch ausserhalb des Lichtraumprofils selbst langer Waggons.

Die Lage des Sevos habe ich durch Versuche bestimmt.
Am Servoarm selbst wird ein Stahldraht befestigt (0,7 mm oder 0,5 mm je nach gewünschtem Anpressdruck).
Die befestigung erfolgt dabei so, dass der Federarm möglichst lang ist, daher ist der Servorarm vom Zungenantrieb abgewendet.
Die Entfernung vom Zungenantrieb richtet sich nach dem Bewegungsbereich des Stahldrahtes. Als Anpressbereich habe ich ca 20% des Bewegungsbereiches genommen.
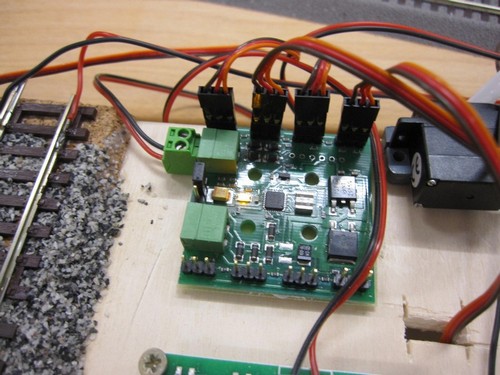
Für die Servoansteuerung wurden 4-fach Weichendecoder SW4 der Fa. CT-Elektronik verwendet, zu beziehen bei Fa. Krois, Schwechat.
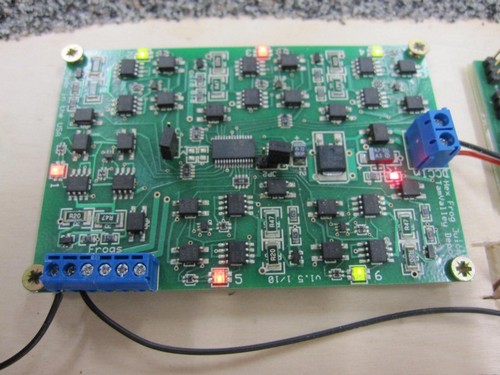
Für die Polarisierung der Herzstücke wurden 6-fach-Umschalter (Hex Frog Juicer v1.5) verwendet, ebenfalls bei Fa. Krois zu beziehen.
Eine feine Sache, elektronische Umschalter! Nicht gerade geschenkt, aber besser als alle Mechanik.
Die Verdrahtung der Servos und Anordnung der Elektronik erfolgt in der Unterkonstruktion der Holzelemente. Zwischen den Holzrahmen ist Elektrik und Elektronik gegen mechansiche beschädigungen und auch gegen Staub geschützt. nachteil: Die optische Funktionskontrolle der LED (Blinken bei Datenempfang, rot / grün der Herzstücke) ist nicht mehr so leicht möglich.